Команда ООО “ЦИФ МГУ имени М.В. Ломоносова” ведет проект по разработке роботизированной антропоморфной руки iHand. iHand может стать частью робота или манипулятора, а также медицинского протеза для пациентов с утратой верхней конечности.
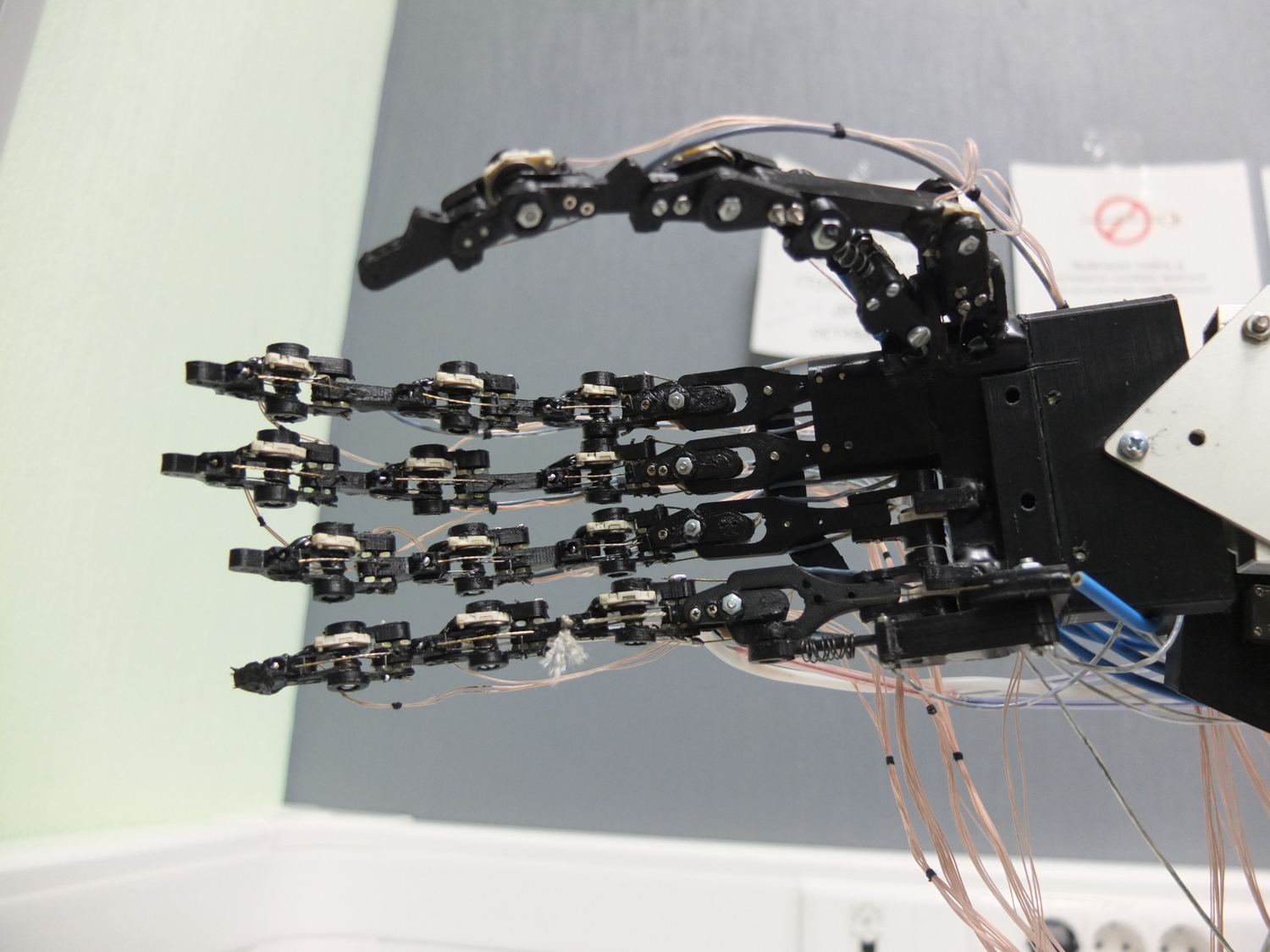
Конструкция кисти iHand имеет 21 степень свободы, что позволяет воспроизводить движения пальцев роботизированной кисти с максимальной степенью приближенности к реальным движениям конечности человека. Движение пальцев осуществляется посредством сервоприводов с помощью системы тяговых тросов и возвратных торсионных пружин.
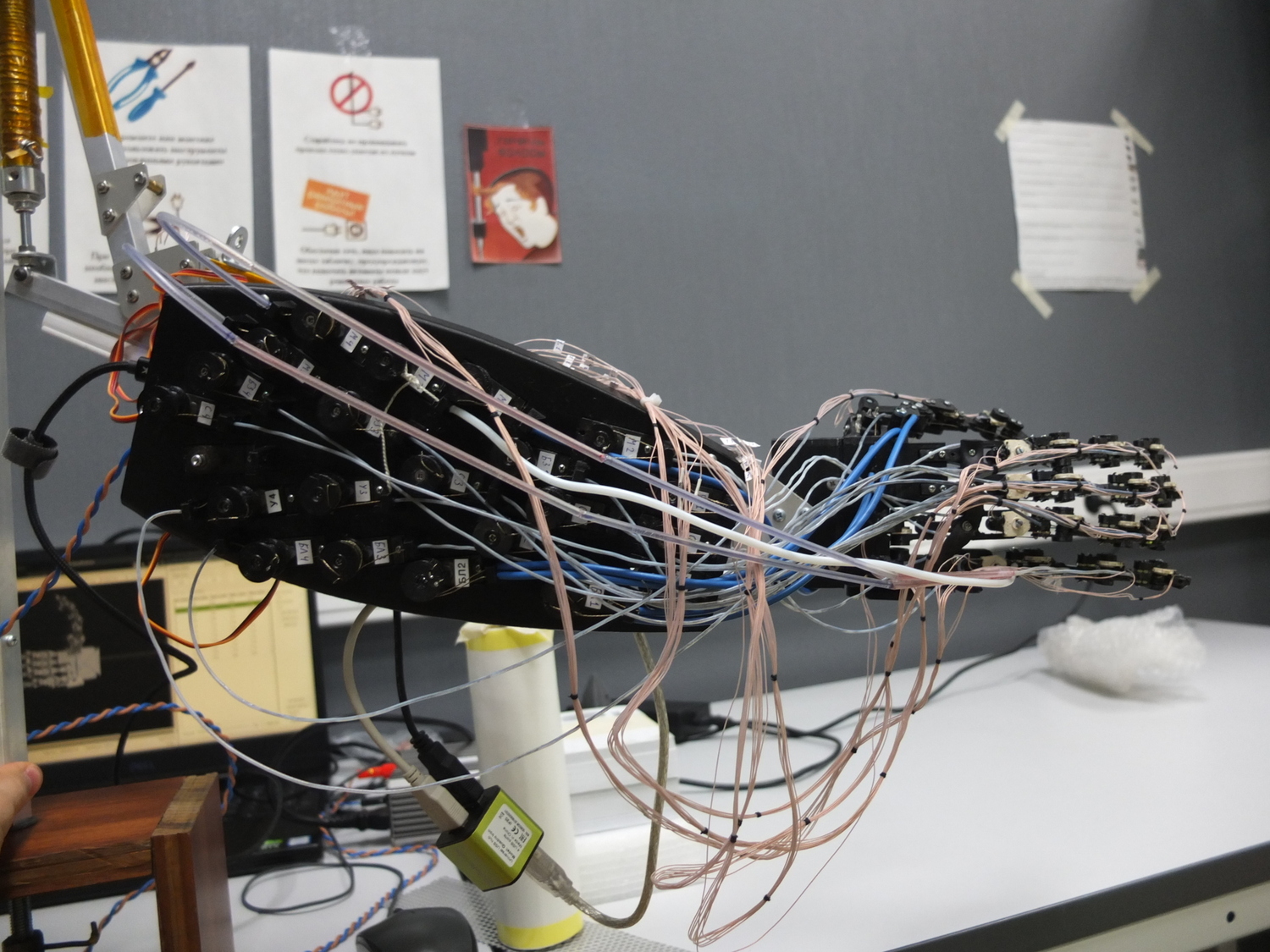
Работа над роботизированной рукой продолжается. Интеллектуальная система управления развивается с использованием алгоритмов машинного обучения для того, чтобы реализовать высокоточное управление движением пальцев с учетом информации от датчиков давления и угла поворота. В ближайшем будущем мы планируем реализовать движение пальцев с помощью синтетических мышц, а не сервоприводов, а также установить декоративный кожух и датчики давления на кисть.
На видео ниже представлено, как на сегодняшний день iHand осуществляет сгибание пальцев и захват объекта.